On the job market this year for research roles
Research in structured 3D vision and efficient, interpretable AI.
I work at the intersection of computer vision, 3D perception, efficient adaptation, and cognitive AI. My research asks how models can recover the structure humans use naturally: parts, scenes, geometry, causal organization, and reusable internal representations.
The core theme is analysis by synthesis: infer hidden structure by building and testing generative explanations. This leads to practical systems for 3D understanding, robust evaluation, and continual learning without brute-force scale.
- 3D part representation learning: part-centric semantics, object pose, reconstruction, and synthetic-to-real transfer.
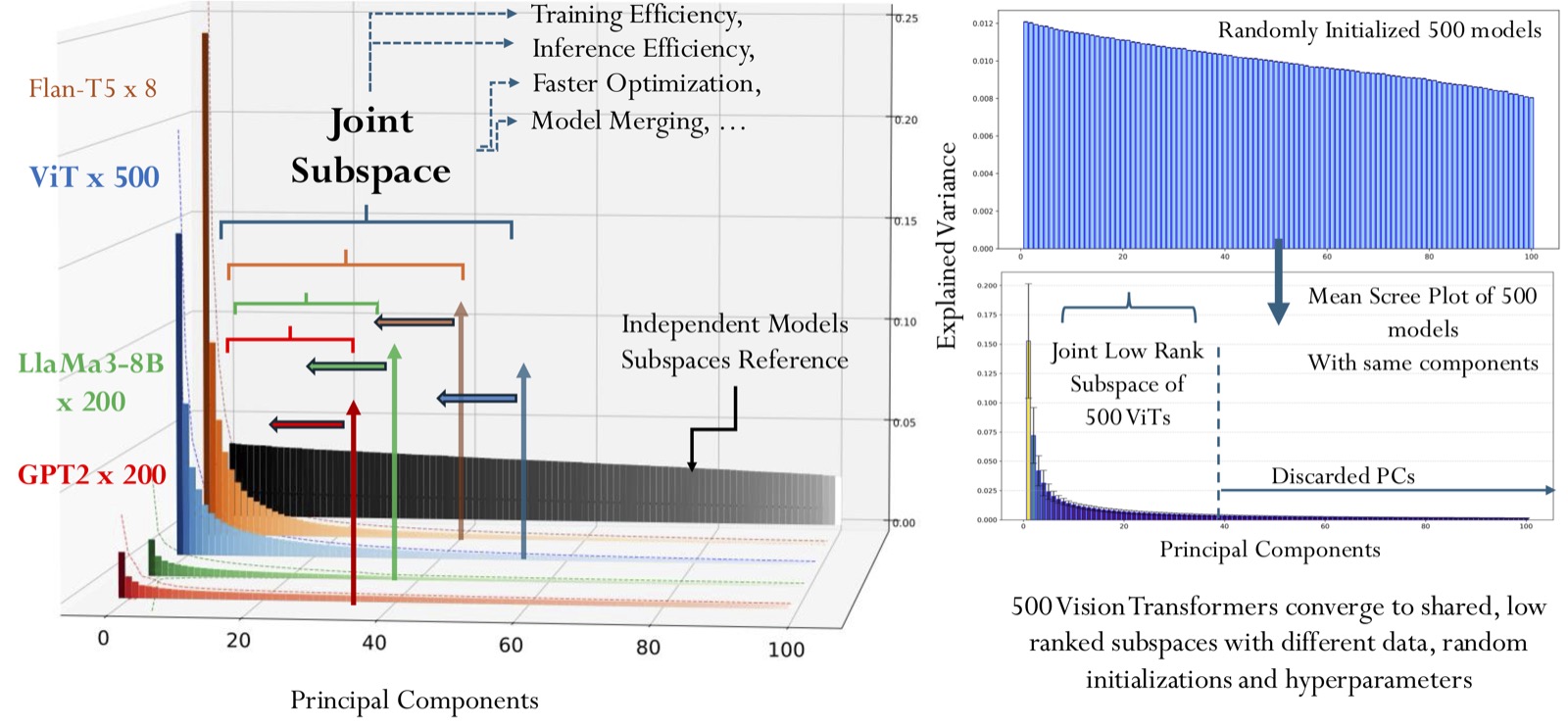
- Physics of AI and mechanistic interpretability: spectral structure, update geometry, model merging, and learning dynamics.
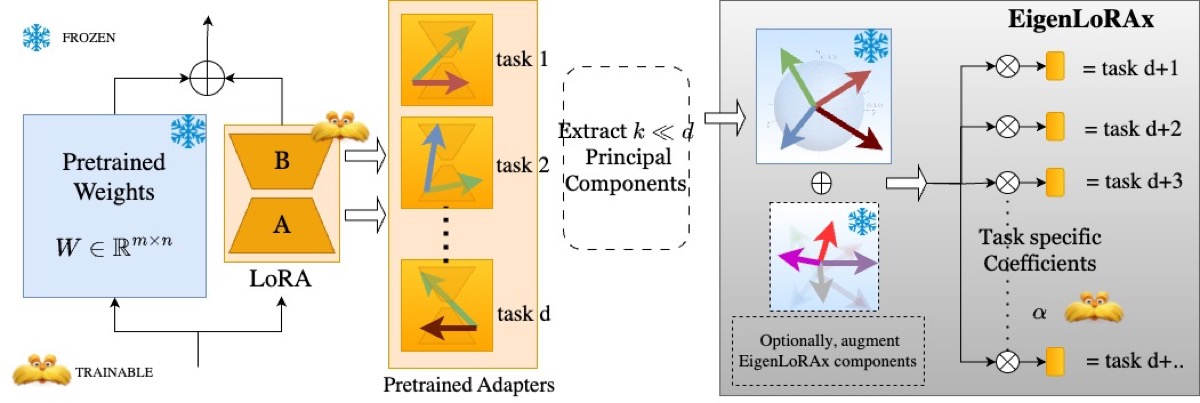
- Efficient learning and inference: parameter-efficient adaptation for LLMs, vision-language models, diffusion models, and 3D models.
- Interpretable and robust learning: failure-aware evaluation for large models and 3D vision systems under shift, occlusion, and hallucination.